
Bottleneck tutorial — jupedsim-scenarios#
A guided tour of the library using the classic bottleneck scenario
(examples/assets/bottleneck.zip, exported from the
Web-Based JuPedSim editor).
Five short steps, each adding one new capability:
Load + run a scenario, inspect the
ScenarioResultobject.Visualize the trajectory with pedpy.
Sweep N (agents) with seeds — stochasticity is real.
Sweep model at fixed N — swap models in one line.
2D sweep: model × bottleneck width — reproduce known physics.
Run top-to-bottom. Steps 3–5 take a few minutes each (tune SEEDS_PER_COND).
# Shared imports + constants
from datetime import datetime
from pathlib import Path
import matplotlib.pyplot as plt
import numpy as np
from jupedsim_scenarios import (
load_scenario,
run_scenario,
run_sweep,
run_sweep_from_factory,
)
# Resolve the bottleneck zip whether the notebook is launched from
# examples/ (default) or from the repository root.
ASSET = Path("assets/bottleneck.zip")
if not ASSET.exists():
ASSET = Path("examples/assets/bottleneck.zip")
SEEDS_PER_COND = 2 # bump to 5+ for publication-quality variance
WORKERS = 4 # parallel trial workers
plt.rcParams["figure.dpi"] = 110
print(f"Executed on {datetime.now().strftime('%d.%m.%Y, %H:%M')}")
Executed on 21.07.2026, 09:32
Step 1 — Load, run, inspect#
The two API calls you’ll use most: load_scenario(path) reads a zip
exported from the web editor, run_scenario(scenario) runs JuPedSim and
returns a ScenarioResult. Everything else in the tutorial builds on
this.
scenario = load_scenario(str(ASSET))
result = run_scenario(scenario, seed=42)
print(f"type: {type(result).__name__}")
print(f"evacuation_time: {result.evacuation_time:.2f} s")
print(f"agents_evacuated: {result.agents_evacuated} / {result.total_agents}")
print(f"frame_rate: {result.frame_rate} fps")
print(f"sqlite trajectory: {result.sqlite_file}")
print()
print("metrics dict keys:", sorted(result.metrics.keys()))
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
type: ScenarioResult
evacuation_time: 53.18 s
agents_evacuated: 50 / 50
frame_rate: 10.0 fps
sqlite trajectory: /tmp/tmpkn3_dwsc.sqlite
metrics dict keys: ['agents_evacuated', 'agents_remaining', 'all_evacuated', 'dt', 'evacuation_time', 'frame_rate', 'message', 'seed', 'status', 'success', 'total_agents', 'walkable_polygon']
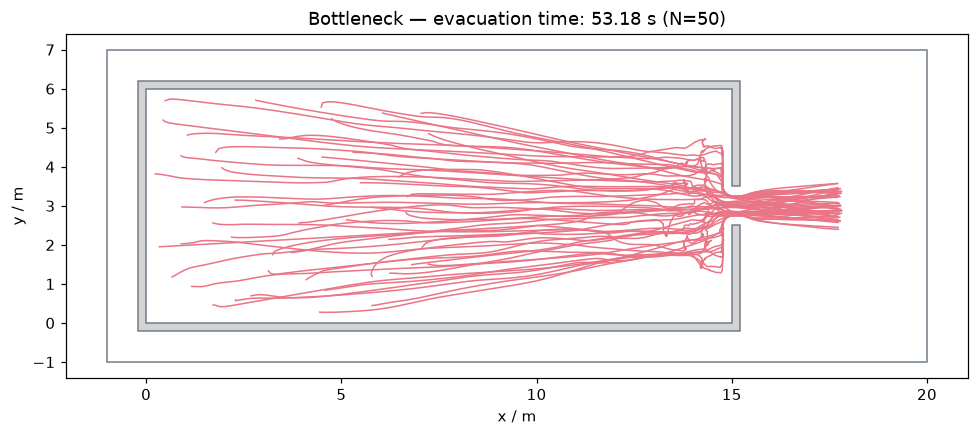
Step 2 — Visualize with pedpy#
result.sqlite_file is a standard JuPedSim trajectory database, so it
plugs straight into pedpy’s loaders and plotters.
from pedpy import WalkableArea, load_trajectory_from_jupedsim_sqlite, plot_trajectories
traj = load_trajectory_from_jupedsim_sqlite(trajectory_file=Path(result.sqlite_file))
walkable = WalkableArea(result.walkable_polygon)
fig, ax = plt.subplots(figsize=(9, 4))
plot_trajectories(traj=traj, walkable_area=walkable, axes=ax)
ax.set_title(f"Bottleneck — evacuation time: {result.evacuation_time:.2f} s "
f"(N={result.total_agents})")
ax.set_aspect("equal")
plt.tight_layout()
plt.show()
result.cleanup() # delete the temp sqlite now that we're done with it
1
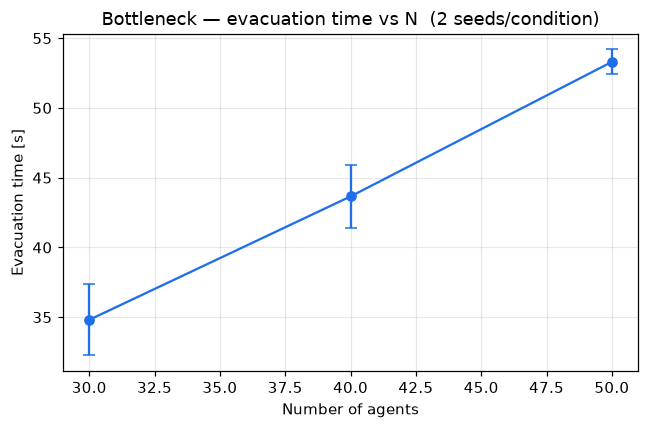
Step 3 — Sweep N with seeds#
run_sweep walks a cartesian product of axes and runs each combination
across all seeds. One axis here (num_agents), three values, two seeds
each = 6 trials. Same scenario, just mutated per-trial via apply.
Stochastic variance is real: even at fixed N, evac times scatter — that’s why we plot mean ± std, not a single number.
base = load_scenario(str(ASSET))
sweep_n = run_sweep(
base,
axes={"num_agents": [30, 40, 50]},
apply={"num_agents": lambda s, n: s.set_agent_count("jps-distributions_0", n)},
seeds=range(100, 100 + SEEDS_PER_COND),
workers=WORKERS,
)
df_n = sweep_n.to_dataframe()
agg = df_n.groupby("num_agents")["evacuation_time"].agg(["mean", "std", "count"])
print(agg)
fig, ax = plt.subplots(figsize=(6, 4))
ax.errorbar(agg.index, agg["mean"], yerr=agg["std"].fillna(0),
fmt="o-", capsize=4, color="#1f6feb")
ax.set_xlabel("Number of agents")
ax.set_ylabel("Evacuation time [s]")
ax.set_title(f"Bottleneck — evacuation time vs N ({SEEDS_PER_COND} seeds/condition)")
ax.grid(alpha=0.3)
plt.tight_layout()
plt.show()
sweep_n.cleanup()
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 30, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=30
INFO - Distribution jps-distributions_0: {'number': 30, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 30 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 40, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=40
INFO - Distribution jps-distributions_0: {'number': 40, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 30, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=30
INFO - Distribution jps-distributions_0: {'number': 30, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 40 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Added 30 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 40, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=40
INFO - Distribution jps-distributions_0: {'number': 40, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 40 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
mean std count
num_agents
30 34.810 2.545584 2
40 43.655 2.241528 2
50 53.300 0.890955 2
6
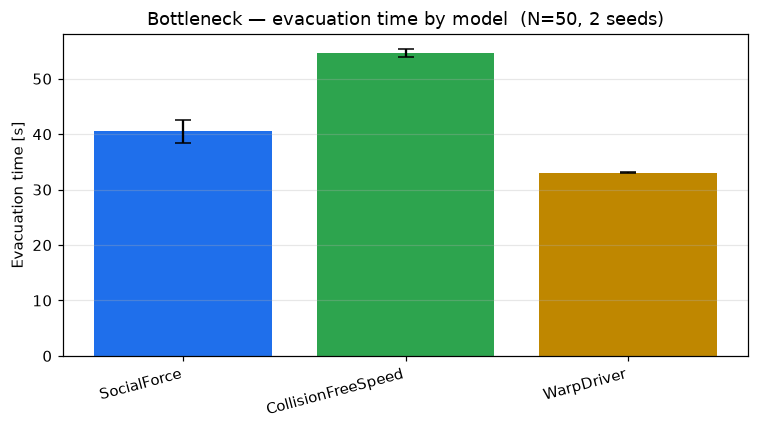
Step 4 — Sweep models at N=50#
Same run_sweep, different axis. the model is a plain attribute;
the rest of the scenario (geometry, distribution, exit) is untouched.
Macro outcomes (evacuation time) often agree across models — the microscopic dynamics differ. We show both: a bar chart of evac times and a side-by-side trajectory snapshot per model.
MODELS = [
"SocialForceModel",
"CollisionFreeSpeedModel",
"WarpDriverModel",
]
base = load_scenario(str(ASSET))
sweep_m = run_sweep(
base,
axes={"model": MODELS},
apply={"model": lambda s, m: setattr(s, "model_type", m)},
seeds=range(200, 200 + SEEDS_PER_COND),
workers=WORKERS,
)
df_m = sweep_m.to_dataframe()
agg_m = df_m.groupby("model")["evacuation_time"].agg(["mean", "std"]).reindex(MODELS)
print(agg_m)
fig, ax = plt.subplots(figsize=(7, 4))
ax.bar(range(len(MODELS)), agg_m["mean"], yerr=agg_m["std"].fillna(0),
capsize=5, color=["#1f6feb", "#2da44e", "#bf8700"])
ax.set_xticks(range(len(MODELS)))
ax.set_xticklabels([m.replace("Model", "") for m in MODELS], rotation=15, ha="right")
ax.set_ylabel("Evacuation time [s]")
ax.set_title(f"Bottleneck — evacuation time by model (N=50, {SEEDS_PER_COND} seeds)")
ax.grid(axis="y", alpha=0.3)
plt.tight_layout()
plt.show()
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Using fallback logic: No journeys defined
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
mean std
model
SocialForceModel 40.56 2.064752
CollisionFreeSpeedModel 54.56 0.721249
WarpDriverModel 33.08 0.014142
# Side-by-side trajectory snapshots — one representative seed per model
fig, axes = plt.subplots(1, len(MODELS), figsize=(15, 4), sharey=True)
for ax, model in zip(axes, MODELS, strict=False):
trial = next(t for t in sweep_m.trials if t.axis_values["model"] == model)
traj = load_trajectory_from_jupedsim_sqlite(trajectory_file=Path(trial.result.sqlite_file))
walkable = WalkableArea(trial.result.walkable_polygon)
plot_trajectories(traj=traj, walkable_area=walkable, axes=ax)
ax.set_title(f"{model.replace('Model', '')}\n"
f"evac = {trial.result.evacuation_time:.1f} s")
ax.set_aspect("equal")
plt.tight_layout()
plt.show()
sweep_m.cleanup()

6
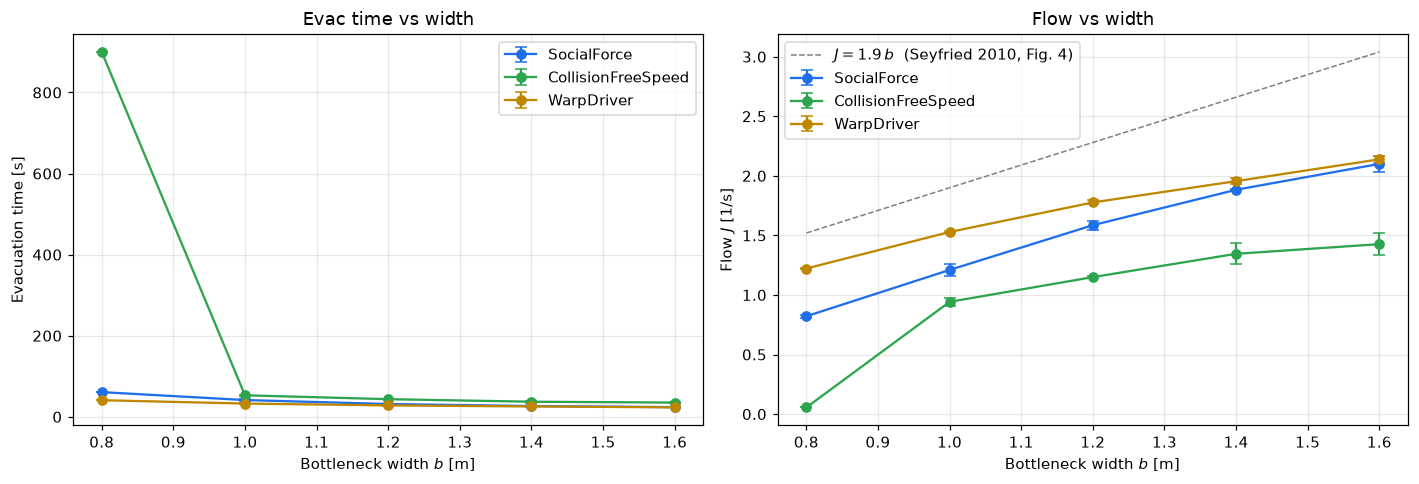
Step 5 — 2D sweep: model × bottleneck width#
Here the geometry itself depends on the trial parameter (width), so we
switch to run_sweep_from_factory: each trial gets a freshly-built
scenario from our factory function.
The bottleneck opening in the default scenario sits between
y = 2.5 and y = 3.5 (width 1.0 m). We rewrite the WKT to vary it,
centred on y = 3.0.
We plot two curves per model:
Evacuation time vs width — drops monotonically as width grows (with one notable exception: see below).
Flow
J = N / tvs width — compared against the empirical linear fitJ = 1.9·breported in Fig. 4 of Seyfried et al., Enhanced empirical data for the fundamental diagram and the flow through bottlenecks.
Watch the CollisionFreeSpeedModel point at b = 0.8 m: agents clog
and only a fraction evacuates before the (raised) simulation cap fires.
Different models cope with the same narrow geometry differently — a
useful reminder that “which model” is itself a parameter worth sweeping.
WIDTHS = [0.8, 1.0, 1.2, 1.4, 1.6]
MODELS_2D = [
"SocialForceModel",
"CollisionFreeSpeedModel",
"WarpDriverModel",
]
# Load the base scenario once; the factory copies it per trial.
# Reloading the zip inside the factory would re-parse it for every
# (trial, seed) combination.
BASE_2D = load_scenario(str(ASSET))
def bottleneck_factory(params):
w = params["width"]
y_lo, y_hi = 3.0 - w / 2, 3.0 + w / 2
# Start from an independent copy of the base scenario, then mutate
# in place. Rewriting the inner ring of the walkable polygon moves
# the bottleneck opening (the gap at x in [15, 15.2]) to the
# requested width; reassigning .walkable_area_wkt re-parses the
# shapely cache automatically.
s = BASE_2D.copy()
s.walkable_area_wkt = (
"POLYGON((20 7, 20 -1, -1 -1, -1 7, 20 7), "
f"(15.2 {y_hi}, 15.2 6.199999999999999, -0.2 6.199999999999999, "
f"-0.2 -0.2, 15.2 -0.2, 15.2 {y_lo}, 15 {y_lo}, "
f"15 2.0000000000000002e-16, 0 0, 0 6, 15 6, 15 {y_hi}, 15.2 {y_hi}))"
)
s.model_type = params["model"]
# Narrow widths can clog hard (especially CFM at b = 0.8 m, which
# still hits the cap — see plot). 900 s gives the better-behaved
# models room to finish even at the narrow end.
s.max_simulation_time = 900
return s, None
trials = [{"model": m, "width": w} for m in MODELS_2D for w in WIDTHS]
sweep_2d = run_sweep_from_factory(
bottleneck_factory,
trials=trials,
seeds=range(300, 300 + SEEDS_PER_COND),
workers=WORKERS,
)
df = sweep_2d.to_dataframe()
df["flow"] = df["total_agents"] / df["evacuation_time"]
agg2 = (df.groupby(["model", "width"])
[["evacuation_time", "flow"]]
.agg(["mean", "std"]))
print(agg2)
INFO - Using fallback logic: No journeys defined
INFO - Using fallback logic: No journeys defined
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using fallback logic: No journeys defined
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
INFO - Using fallback logic: No journeys defined
INFO - Processing with parameters: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'flow_start_time': 0, 'flow_end_time': 10, 'percentage': None, 'distribution_mode': 'by_number', 'use_flow_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'v0_distribution': 'constant'}
INFO - Using default parameters: v0=1.3, radius=0.2, n_agents=50
INFO - Distribution jps-distributions_0: {'number': 50, 'radius': 0.2, 'v0': 1.3, 'distribution_mode': 'by_number', 'percentage': None, 'use_flow_spawning': False, 'flow_start_time': 0, 'flow_end_time': 10, 'strict_spawning': False, 'use_premovement': False, 'premovement_distribution': 'gamma', 'premovement_param_a': None, 'premovement_param_b': None, 'premovement_seed': None, 'radius_distribution': 'constant', 'radius_std': None, 'v0_distribution': 'constant', 'v0_std': None}
INFO - Added 50 agents using fallback logic (immediate), prepared 0 flow sources
evacuation_time flow
mean std mean std
model width
CollisionFreeSpeedModel 0.8 900.000 0.000000 0.055556 0.000000
1.0 53.100 1.767767 0.942142 0.031365
1.2 43.485 0.318198 1.149853 0.008414
1.4 37.245 2.467803 1.345415 0.089145
1.6 35.120 2.262742 1.426651 0.091918
SocialForceModel 0.8 60.890 0.806102 0.821225 0.010872
1.0 41.355 1.633417 1.209987 0.047791
1.2 31.540 0.777817 1.585771 0.039107
1.4 26.555 0.035355 1.882886 0.002507
1.6 23.820 0.777817 2.100196 0.068580
WarpDriverModel 0.8 40.915 0.091924 1.222049 0.002746
1.0 32.710 0.141421 1.528599 0.006609
1.2 28.145 0.261630 1.776591 0.016515
1.4 25.570 0.311127 1.955561 0.023795
1.6 23.380 0.325269 2.138787 0.029755
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(13, 4.5))
colors = {"SocialForceModel": "#1f6feb",
"CollisionFreeSpeedModel": "#2da44e",
"WarpDriverModel": "#bf8700"}
for model in MODELS_2D:
sub = df[df.model == model].groupby("width")
et = sub["evacuation_time"].agg(["mean", "std"])
fl = sub["flow"].agg(["mean", "std"])
ax1.errorbar(et.index, et["mean"], yerr=et["std"].fillna(0),
fmt="o-", capsize=4, label=model.replace("Model", ""),
color=colors[model])
ax2.errorbar(fl.index, fl["mean"], yerr=fl["std"].fillna(0),
fmt="o-", capsize=4, label=model.replace("Model", ""),
color=colors[model])
ax1.set_xlabel("Bottleneck width $b$ [m]")
ax1.set_ylabel("Evacuation time [s]")
ax1.set_title("Evac time vs width")
ax1.grid(alpha=0.3); ax1.legend()
w_line = np.linspace(min(WIDTHS), max(WIDTHS), 50)
ax2.plot(w_line, 1.9 * w_line, color="gray", ls="--", lw=1,
label=r"$J = 1.9\,b$ (Seyfried 2010, Fig. 4)")
ax2.set_xlabel("Bottleneck width $b$ [m]")
ax2.set_ylabel("Flow $J$ [1/s]")
ax2.set_title("Flow vs width")
ax2.grid(alpha=0.3); ax2.legend()
plt.tight_layout()
plt.show()
sweep_2d.cleanup()
30
Where to go from here#
Pick any
Scenario.set_*mutator and add it as a sweep axis.For studies whose geometry depends on the parameter, use
run_sweep_from_factory(as in step 5).Trial results expose
result.sqlite_fileandresult.trajectory_dataframe()— both feed directly into pedpy for density, flow, Voronoi, and fundamental-diagram analysis.For long sweeps, persist
sweep.to_dataframe()to CSV/parquet before callingsweep.cleanup().